Functions | |
| void | printIRDataShort (Print *aSerial, IRData *aIRDataPtr) |
| void | printIRResultShort (Print *aSerial, IRData *aIRDataPtr, bool aPrintRepeatGap) |
| Deprecated static function to be able to print data to send or copied received data. More... | |
| void | printIRResultShort (Print *aSerial, IRData *aIRDataPtr) |
| void | printNumberOfRepeats (Print *aSerial) |
| bool | IRrecv::printIRResultShort (Print *aSerial, bool aPrintRepeatGap, bool aCheckForRecordGapsMicros) __attribute__((deprecated("Remove second parameter |
| Function to print values and flags of IrReceiver.decodedIRData in one line. More... | |
| bool | IRrecv::printIRResultShort (Print *aSerial, bool aCheckForRecordGapsMicros=true) |
| void | IRrecv::printDistanceWidthTimingInfo (Print *aSerial, DistanceWidthTimingInfoStruct *aDistanceWidthTimingInfo) |
| uint8_t | IRrecv::getMaximumMarkTicksFromRawData () |
| uint8_t | IRrecv::getMaximumSpaceTicksFromRawData () |
| uint8_t | IRrecv::getMaximumTicksFromRawData (bool aSearchSpaceInsteadOfMark) |
| uint32_t | IRrecv::getTotalDurationOfRawData () |
| void | IRrecv::printIRSendUsage (Print *aSerial) |
| Function to print values and flags of IrReceiver.decodedIRData in one line. More... | |
| void | IRrecv::printIRResultMinimal (Print *aSerial) |
| Function to print protocol number, address, command, raw data and repeat flag of IrReceiver.decodedIRData in one short line. More... | |
| void | IRrecv::printIRDuration (Print *aSerial, bool aOutputMicrosecondsInsteadOfTicks) |
| void | IRrecv::printIRResultRawFormatted (Print *aSerial, bool aOutputMicrosecondsInsteadOfTicks=true) |
| Dump out the timings in IrReceiver.irparams.rawbuf[] array 8 values per line. More... | |
| void | IRrecv::compensateAndPrintIRResultAsCArray (Print *aSerial, bool aOutputMicrosecondsInsteadOfTicks=true) |
| Dump out the IrReceiver.irparams.rawbuf[] to be used as C definition for sendRaw(). More... | |
| void | IRrecv::printIRResultAsCArray (Print *aSerial, bool aOutputMicrosecondsInsteadOfTicks=true, bool aDoCompensate=true) |
| void | IRrecv::compensateAndStoreIRResultInArray (uint8_t *aArrayPtr) |
| Store the decodedIRData to be used for sendRaw(). More... | |
| void | IRrecv::printIRResultAsCVariables (Print *aSerial) |
| Print results as C variables to be used for sendXXX() uint16_t address = 0x44; uint16_t command = 0x11; uint32_t rawData = 0x44BB11EE;. More... | |
| const char * | IRrecv::getProtocolString () |
| bool | IRrecv::decode_old (decode_results *aResults) |
Detailed Description
Function Documentation
◆ compensateAndPrintIRResultAsCArray()
| void IRrecv::compensateAndPrintIRResultAsCArray | ( | Print * | aSerial, |
| bool | aOutputMicrosecondsInsteadOfTicks = true |
||
| ) |
Dump out the IrReceiver.irparams.rawbuf[] to be used as C definition for sendRaw().
Print ticks in 8 bit format to save space. Maximum is 255*50 microseconds = 12750 microseconds = 12.75 ms, which hardly ever occurs inside an IR sequence. Recording of IRremote anyway stops at a gap of RECORD_GAP_MICROS (5 ms).
- Parameters
-
aSerial The Print object on which to write, for Arduino you can use &Serial. aOutputMicrosecondsInsteadOfTicks Output the (rawbuf_values * MICROS_PER_TICK) for better readability. aDoCompensate Compensate received values by MARK_EXCESS_MICROS, like it is done for decoding!
Definition at line 2227 of file IRReceive.hpp.

◆ compensateAndStoreIRResultInArray()
| void IRrecv::compensateAndStoreIRResultInArray | ( | uint8_t * | aArrayPtr | ) |
Store the decodedIRData to be used for sendRaw().
Compensate received values by MARK_EXCESS_MICROS, like it is done for decoding and store it in an array.
Maximum for uint8_t is 255*50 microseconds = 12750 microseconds = 12.75 ms, which hardly ever occurs inside an IR frame.
- Parameters
-
aArrayPtr Address of an array provided by the caller.
Definition at line 2284 of file IRReceive.hpp.
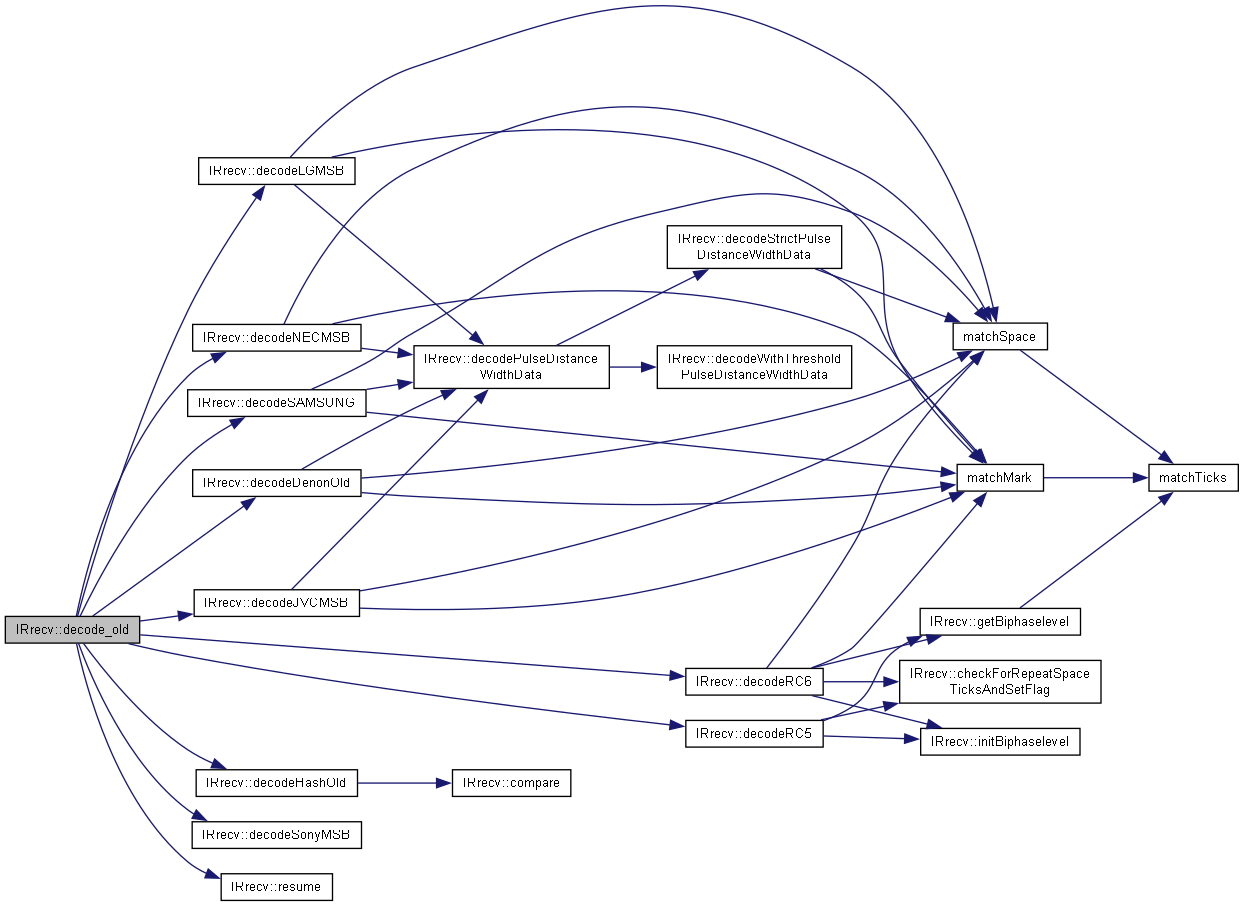
◆ decode_old()
| bool IRrecv::decode_old | ( | decode_results * | aResults | ) |
Definition at line 2361 of file IRReceive.hpp.

◆ getMaximumMarkTicksFromRawData()
| uint8_t IRrecv::getMaximumMarkTicksFromRawData | ( | ) |
Definition at line 1840 of file IRReceive.hpp.
◆ getMaximumSpaceTicksFromRawData()
| uint8_t IRrecv::getMaximumSpaceTicksFromRawData | ( | ) |
Definition at line 1850 of file IRReceive.hpp.
◆ getMaximumTicksFromRawData()
| uint8_t IRrecv::getMaximumTicksFromRawData | ( | bool | aSearchSpaceInsteadOfMark | ) |
Definition at line 1864 of file IRReceive.hpp.
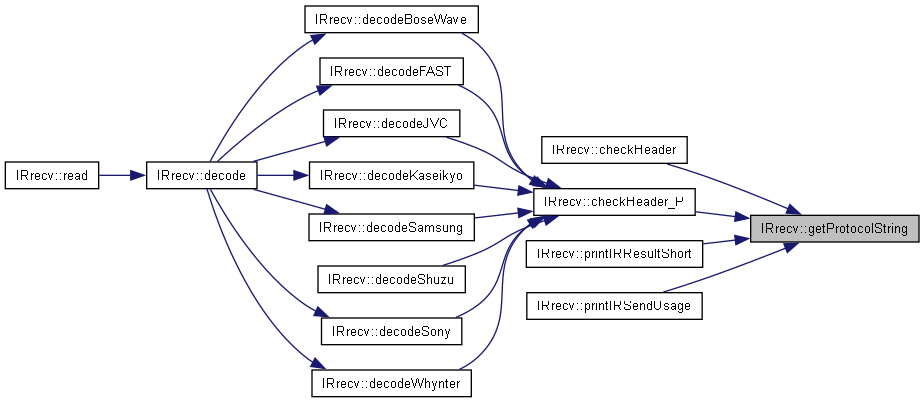
◆ getProtocolString()
| const char * IRrecv::getProtocolString | ( | ) |
Definition at line 2348 of file IRReceive.hpp.

◆ getTotalDurationOfRawData()
| uint32_t IRrecv::getTotalDurationOfRawData | ( | ) |
Definition at line 1881 of file IRReceive.hpp.
◆ printDistanceWidthTimingInfo()
| void IRrecv::printDistanceWidthTimingInfo | ( | Print * | aSerial, |
| DistanceWidthTimingInfoStruct * | aDistanceWidthTimingInfo | ||
| ) |

◆ printIRDataShort()
| void printIRDataShort | ( | Print * | aSerial, |
| IRData * | aIRDataPtr | ||
| ) |
Definition at line 1664 of file IRReceive.hpp.


◆ printIRDuration()
| void IRrecv::printIRDuration | ( | Print * | aSerial, |
| bool | aOutputMicrosecondsInsteadOfTicks | ||
| ) |
Definition at line 2106 of file IRReceive.hpp.
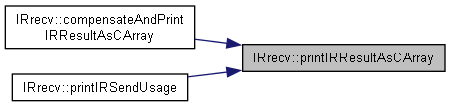
◆ printIRResultAsCArray()
| void IRrecv::printIRResultAsCArray | ( | Print * | aSerial, |
| bool | aOutputMicrosecondsInsteadOfTicks = true, |
||
| bool | aDoCompensate = true |
||
| ) |
Definition at line 2230 of file IRReceive.hpp.

◆ printIRResultAsCVariables()
| void IRrecv::printIRResultAsCVariables | ( | Print * | aSerial | ) |
Print results as C variables to be used for sendXXX() uint16_t address = 0x44; uint16_t command = 0x11; uint32_t rawData = 0x44BB11EE;.
- Parameters
-
aSerial The Print object on which to write, for Arduino you can use &Serial.
Definition at line 2310 of file IRReceive.hpp.
◆ printIRResultMinimal()
| void IRrecv::printIRResultMinimal | ( | Print * | aSerial | ) |
Function to print protocol number, address, command, raw data and repeat flag of IrReceiver.decodedIRData in one short line.
Does not print a Newline / does not end with println().
- Parameters
-
aSerial The Print object on which to write, for Arduino you can use &Serial.
Definition at line 2065 of file IRReceive.hpp.
◆ printIRResultRawFormatted()
| void IRrecv::printIRResultRawFormatted | ( | Print * | aSerial, |
| bool | aOutputMicrosecondsInsteadOfTicks = true |
||
| ) |
Dump out the timings in IrReceiver.irparams.rawbuf[] array 8 values per line.
- Parameters
-
aSerial The Print object on which to write, for Arduino you can use &Serial. aOutputMicrosecondsInsteadOfTicks Output the (rawbuf_values * MICROS_PER_TICK) for better readability.
Definition at line 2128 of file IRReceive.hpp.
◆ printIRResultShort() [1/4]
| bool IRrecv::printIRResultShort | ( | Print * | aSerial, |
| bool | aCheckForRecordGapsMicros = true |
||
| ) |

◆ printIRResultShort() [2/4]
| bool IRrecv::printIRResultShort | ( | Print * | aSerial, |
| bool | aPrintRepeatGap, | ||
| bool | aCheckForRecordGapsMicros | ||
| ) |
Function to print values and flags of IrReceiver.decodedIRData in one line.
Ends with println().
- Parameters
-
aSerial The Print object on which to write, for Arduino you can use &Serial. aCheckForRecordGapsMicros If true, call CheckForRecordGapsMicros() which may do a long printout, which in turn may block the proper detection of repeats.*
- Returns
- true, if CheckForRecordGapsMicros() has printed a message, i.e. gap < 15ms (RECORD_GAP_MICROS_WARNING_THRESHOLD).
Definition at line 1541 of file IRReceive.hpp.

◆ printIRResultShort() [3/4]
| void printIRResultShort | ( | Print * | aSerial, |
| IRData * | aIRDataPtr | ||
| ) |

◆ printIRResultShort() [4/4]
| void printIRResultShort | ( | Print * | aSerial, |
| IRData * | aIRDataPtr, | ||
| bool | aPrintRepeatGap | ||
| ) |
Deprecated static function to be able to print data to send or copied received data.
Ends with println().
- Parameters
-
aSerial The Print object on which to write, for Arduino you can use &Serial. aIRDataPtr Pointer to the data to be printed. aPrintRepeatGap If true also print the gap before repeats.
Definition at line 1719 of file IRReceive.hpp.

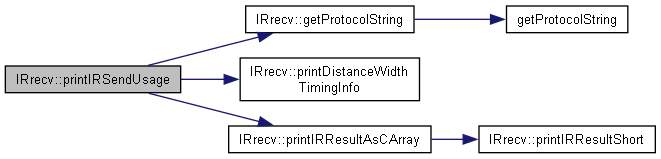
◆ printIRSendUsage()
| void IRrecv::printIRSendUsage | ( | Print * | aSerial | ) |
Function to print values and flags of IrReceiver.decodedIRData in one line.
do not print for repeats except IRDATA_FLAGS_IS_PROTOCOL_WITH_DIFFERENT_REPEAT. Ends with println(). !!!Attention: The result differs on a 8 bit or 32 bit platform!!!
- Parameters
-
aSerial The Print object on which to write, for Arduino you can use &Serial.
Definition at line 1904 of file IRReceive.hpp.
◆ printNumberOfRepeats()
| void printNumberOfRepeats | ( | Print * | aSerial | ) |

