Arduino IRremote




If you find this program useful, please give it a star.
Table of contents
- Supported IR Protocols
- Common issues when using IRremote
- Migrating legacy projects to the latest version
- Why *.hpp instead of *.cpp files
- Using the new *.hpp files
- Tutorials
- 3 ways to specify an IR code
- IRReceiver pinouts
- Receiving IR codes
- Sending IR codes
- Tiny NEC receiver and sender
- IRCommandDispatcher class
- The FAST protocol
- Feedback LED
- FAQ and hints
- Receiving stops after analogWrite() or tone() or after running a motor
- Receiving sets overflow flag
- Problems with Neopixels, FastLed etc.
- Does not work/compile with another library
- Multiple IR receivers
- Multiple IR sender instances
- Increase strength of sent output signal
- Simulate an IR receiver module for sending
- Minimal CPU clock frequency
- Bang & Olufsen protocol
- Examples for this library
- WOKWI online examples
- IR control of a robot car
- Issues and discussions
- Compile options / macros for IRremote
- Macros for TinyIR
- Macros for IRCommandDispatcher
- Supported Boards
- Timer and pin usage
- How we decode signals
- NEC encoding diagrams
- Quick comparison of 5 Arduino IR receiving libraries
- History
- Useful links
- Contributors
- License
- Copyright
Supported IR Protocols
NEC / Onkyo / Apple, Denon / Sharp, Panasonic / Kaseikyo,
JVC, LG, RC5, RC6, Samsung, Sony, Marantz
Universal Pulse Distance, Universal Pulse Width, Universal Pulse Distance Width
Hash, Pronto
BoseWave, Bang & Olufsen, Lego, FAST, Whynter, Marantz, MagiQuest, Velux, OpenLASIR
Protocols can be switched off and on by defining macros before the line #include <IRremote.hpp> like here:
Common issues when using IRremote
Or *"I build a gadget with 2 motors controlled by IR and the [IR stops after the first motor command](https://github.com/Arduino-IRremote/Arduino-IRremote?tab=readme-ov-file#receiving-stops-after-analogwrite-or-tone-or-after-running-a-motor)"*.
This is due to the fact, that the motor control by AnalogWrite() uses the same timer as IR receiving.
See this table for the list of timers and pins.
Migrating legacy projects to the latest version
This library has been refactored, breaking backward compatibility with the old version, on which many examples on the Internet are based.
If your code uses irrecv.decode(&results), it is written for Version 2.x. This library (Version 4.x) now uses a simpler IrReceiver.decode() syntax. See the Conversion guide below.
New features and changes in version 4.6
** Version 4.5.0 does not work for ESP platform, because of missing ESP IRAM_ATTR for receiving interrupt.**
- Support for multiple receiver instances.
irparams_struct irparamsis now member ofIRrecv. ThusrawDataPtr(pointer to irparams) was removed fromIrReceiver.decodedIRData.
OldIrReceiver.decodedIRData.rawDataPtr->rawbufis nowIrReceiver.irparams.rawbuf, the same holds forIrReceiver.irparams.rawlen. - LED feedback is always enabled for sending. It can only be disabled by using
#define NO_LED_SEND_FEEDBACK_CODEor#define NO_LED_FEEDBACK_CODE. - The second parameter of the function
IrSender.begin(uint_fast8_t aSendPin, bool aEnableLEDFeedback)has changed touint_fast8_t aFeedbackLEDPin. Therefore this function call no longer works as expected because it uses the old boolean value of e.g.ENABLE_LED_FEEDBACKwhich evaluates to true or 1 as pin number of the LED feedback pin number. - New experimental Velux send function.
- Send function for Marantz version of the RC5x protocol. This protocol has an additional 6 bit command extension and adds a short pause after the address is sent to identify this variant of the protocol.
New features of version 4.x
- Since 4.3
IrSender.begin(DISABLE_LED_FEEDBACK)will no longer work, use#define NO_LED_SEND_FEEDBACK_CODEinstead. - New universal Pulse Distance / Pulse Width / Pulse Distance Width decoder added, which covers many previous unknown protocols.
- Printout of code how to send received command by
IrReceiver.printIRSendUsage(&Serial). - RawData type is now 64 bit for 32 bit platforms and therefore
decodedIRData.decodedRawDatacan contain complete frame information for more protocols than with 32 bit as before. - Callback after receiving a command - It calls your code as soon as a frame was received.
- Improved handling of
PULSE_DISTANCE+PULSE_WIDTHprotocols. - New FAST protocol.
- Automatic printout of the corresponding send function with
printIRSendUsage().
Converting your 3.x program to the 4.x version
- You must replace
#define DECODE_DISTANCEby#define DECODE_DISTANCE_WIDTH(only if you explicitly enabled this decoder). - The parameter
bool hasStopBitis no longer required and removed e.g. for functionsendPulseDistanceWidth().
New features of version 3.x
- Any pin can be used for receiving and if
SEND_PWM_BY_TIMERis not defined also for sending. - Feedback LED can be activated for sending / receiving.
- An 8/16 bit ****command** value as well as a 16-bit address and a protocol number is provided for decoding (instead of the old 32 bit value).
- Protocol values comply to protocol standards.
NEC, Panasonic, Sony, Samsung and JVC decode & send LSB first. - Supports Universal Distance protocol, which covers a lot of previous unknown protocols.
- Compatible with tone() library. See the ReceiveDemo example.
- Simultaneous sending and receiving. See the SendAndReceive example.
- Supports more platforms.
- Allows for the generation of non-PWM signal to just simulate an active low receiver signal for direct connect to existing receiving devices without using IR.
- Easy protocol configuration, directly in your source code.
Reduces memory footprint and decreases decoding time. - Contains a very small NEC only decoder, which does not require any timer resource.
-> Feature comparison of 5 Arduino IR libraries.
Converting your 2.x program to the 4.x version
Starting with the 3.1 version, the generation of PWM for sending is done by software, thus saving the hardware timer and enabling arbitrary output pins for sending.
If you use an (old) Arduino core that does not use the -flto flag for compile, you can activate the line #define SUPPRESS_ERROR_MESSAGE_FOR_BEGIN in IRRemote.h, if you get false error messages regarding begin() during compilation.
- IRreceiver and IRsender object have been added and can be used without defining them, like the well known Arduino Serial object.
- Just remove the line
IRrecv IrReceiver(IR_RECEIVE_PIN);and/orIRsend IrSender;in your program and replace all occurrences ofIRrecv.orirrecv.withIrReceiverand replace allIRsendorirsendwithIrSender. - Like for the Serial object, call
IrReceiver.begin(IR_RECEIVE_PIN, ENABLE_LED_FEEDBACK)orIrReceiver.begin(IR_RECEIVE_PIN, DISABLE_LED_FEEDBACK)instead of theIrReceiver.enableIRIn()orirrecv.enableIRIn()in setup().
If IR_SEND_PIN is not defined (before the line#include <IRremote.hpp>) you must use e.g.IrSender.begin(3); - Old
decode(decode_results *aResults)function is replaced by simpledecode(). So if you have a statementif(irrecv.decode(&results))replace it withif (IrReceiver.decode()). - The decoded result is now in in
IrReceiver.decodedIRDataand not inresultsany more, therefore replace any occurrences ofresults.valueandresults.decode_type(and similar) toIrReceiver.decodedIRData.decodedRawDataandIrReceiver.decodedIRData.protocol. - Overflow, Repeat and other flags are now in
IrReceiver.receivedIRData.flags. - Seldom used:
results.rawbufandresults.rawlenmust be replaced byIrReceiver.irparams.rawbufandIrReceiver.decodedIRData.rawlen. - The 5 protocols NEC, Panasonic, Sony, Samsung and JVC have been converted to LSB first. Send functions for sending old MSB data were renamed to
sendNECMSB,sendSamsungMSB(),sendSonyMSB()andsendJVCMSB(). The oldsendSAMSUNG()andsendSony()MSB functions are still available. The old MSB version ofsendPanasonic()function was deleted, since it had bugs nobody recognized and therefore was assumed to be never used.
For converting MSB codes to LSB see below or use the new functionsbitreverseOneByte()orbitreverse32Bit()for reversing.
Example
Old 2.x program:
New 4.x program:
Sample output
For more, see the UnitTest log.
How to convert old MSB first 32 bit IR data codes to new LSB first 32 bit IR data codes
For the new decoders for NEC, Panasonic, Sony, Samsung and JVC, the result IrReceiver.decodedIRData.decodedRawData is now LSB-first, as the definition of these protocols suggests!
To convert one into the other, you must reverse the nibble (4 bit / Hex numbers) positions and then reverse all bit positions of each nibble or write it as one binary string and reverse/mirror it.
This can be done by using the new functions bitreverseOneByte() or bitreverse32Bit().
Nibble reverse
0xCB 34 01 02 MSB value
0x20 10 43 BC after nibble reverse
0x40 80 2C D3 LSB value after bit reverse of each nibble
Nibble reverse map
Binary string reverse
If you read the first binary sequence backwards (right to left), you get the second sequence.
0xCB340102 is binary 1100 1011 0011 0100 0000 0001 0000 0010.
0x40802CD3 is binary 0100 0000 1000 0000 0010 1100 1101 0011.
Online tool which reverses every byte, but not the order of the bytes
Use this tool provided by analysir.
Send MSB directly
Sending old MSB codes without conversion can be done by using sendNECMSB(), sendSonyMSB(), sendSamsungMSB(), sendJVCMSB().
Errors when using the 4.x versions for old tutorials
If you suffer from errors with old tutorial code including IRremote.h instead of IRremote.hpp, just try to rollback to Version 2.4.0.
Most likely your code will run and you will not miss the new features.
Staying on 2.x
Consider using the original 2.4 release from 2017 or the last backwards compatible 2.8 version for you project.
It may be sufficient and deals flawlessly with 32 bit IR codes.
If this doesn't work for you, you can be sure that 4.x is trying to be compatible with earlier versions, so your old examples should work just fine.
Drawbacks of using 2.x
- Only the following decoders are available:
NECDenonPanasonicJVCLG
RC5RC6SamsungSony - The call of
irrecv.decode(&results)uses the old MSB first decoders like in 2.x and sets the 32 bit codes inresults.value. - No decoding to a more meaningful (constant) 8/16 bit address and 8 bit command.
Why *.hpp instead of *.cpp files?
Every *.cpp file is compiled separately by a call of the compiler exclusively for this cpp file. These calls are managed by the IDE / make system. In the Arduino IDE the calls are executed when you click on Verify or Upload.
And now our problem with Arduino is:
How to set compile options for all *.cpp files, especially for libraries used?
IDE's like Sloeber or PlatformIO support this by allowing to specify a set of options per project. They add these options at each compiler call e.g. -DTRACE.
But Arduino lacks this feature. So the workaround is not to compile all sources separately, but to concatenate them to one huge source file by including them in your source.
This is done by e.g. #include "IRremote.hpp".
But why not #include "IRremote.cpp"?
If you try it, you will see lots of errors, because each function of the *.cpp file is now compiled twice:
first when the huge file is compiled, and second when the .cpp file is compiled separately, as described above.
Therefore, using the **.cpp** extension is no longer possible. One solution is to use the **.hpp** extension to indicate that it is an included .cpp file.
Any other extension would work, e.g. cinclude, but hpp seems to be common sense.
Using the new *.hpp files
In order to support compile options more easily, you must use the statement #include <IRremote.hpp> instead of #include <IRremote.h> in your main program (aka *.ino file with setup() and loop()).
In all other files you must use the following, to prevent multiple definitions linker errors:
Ensure that all macros in your main program are defined before any #include <IRremote.hpp>.
The following macros will definitely be overridden with default values otherwise:
RAW_BUFFER_LENGTHIR_SEND_PINSEND_PWM_BY_TIMER
Tutorials
- A very elaborated introduction to IR remotes and IRremote library from DroneBot Workshop.
3 ways to specify an IR code
There are 3 different ways of specifying a particular IR code.
- Timing (Raw): Records the exact duration of pulses. Uses the most memory but works for everything.
- Encoding Schemes: General rules for each data bit (like how 1s and 0s are shaped).
- Protocols (Recommended): Uses predefined names (like NEC or Sony) and small 8 or 16-bit addresses and commands. Most efficient and easiest to read.
1. Timing
The timing of each mark/pulse and space/distance_between_pulses is specified in a list or array. This enables specifying all IR codes, but requires a lot of memory and is not readable at all. One formal definition of such a timing array, including specification of frequency and repeats is the Pronto format.
Memory can be saved by using a lower time resolution. For IRremote you can use a 50 µs resolution which halves the memory requirement by using byte values instead of int16 values. For receiving purposes you can use the hash of the timing provided by the decodeHash() decoder.
2. Encoding schemes
There are 3 main encoding schemes which encode a binary bitstream / hex value:
PULSE_DISTANCE. The distance between pulses determines the bit value. This always requires a stop bit! Examples are NEC and KASEIKYO protocols. The pulse width is constant for most protocols.PULSE_WIDTH. The width of a pulse determines the bit value, pulse distance is constant. This requires no stop bit! The only known example is the SONY protocol.- Phase / Manchester encoding. The time of the pulse/pause transition (phase) relative to the clock determines the bit value. Examples are RC5 and RC6 protocols.
Phase encoding has a constant bit length, PULSE_DISTANCE with constant pulse width and PULSE_WIDTH have no constant bit length!
A well known example for PULSE_DISTANCE with non constant pulse width encoding is the RS232 serial encoding. Here the non constant pulse width is used to enable a constant bit length.
Most IR signals have a special header to help in setting the automatic gain of the receiver circuit. This header is not part of the encoding, but is often significant for a special protocol and therefore must be reproducible.
Be aware that there are codes using a PULSE_DISTANCE encoding where more than a binary 0/1 is put into a pulse/pause combination. This requires more than 2 different pulse or pause length combinations. The HobToHood protocol uses such an encoding.
Using encoding schemes reduces the specification of an IR code to a bitstream / hex value, which is LSB by default and pulse / pause timings of header, 0, and 1. The hex value is quite readable. These schemes can not put any semantics like address, command or checksum on this bitstream.
3. Protocols
There are a few common protocols that are implemented directly in IRremote. They specify the frequency, the timings of header, 0, and 1 as well as other values like checksum, repeat distance, repeat coding, bit toggling etc. The semantics of the hex value is also specified, allowing the usage of only 2 parameters address and command to specify an IR code. This saves memory and is highly readable. Often the address is also constant, which further reduces memory requirements.
IRReceiver pinouts

Receiving IR codes
In your program you check for a completely received IR frame with:
if (IrReceiver.decode()) {}
This also decodes the received data.
After successful decoding, the IR data is contained in the IRData structure, available as IrReceiver.decodedIRData.
decodedIRData structure
Flags
This is the list of flags contained in the flags field.
Check it with e.g. if(IrReceiver.decodedIRData.flags & IRDATA_FLAGS_IS_REPEAT).
| Flag name | Description |
|---|---|
| IRDATA_FLAGS_IS_REPEAT | The gap between the preceding frame is as smaller than the maximum gap expected for a repeat. !!!We do not check for changed command or address, because it is virtually impossible to press 2 different buttons on the remote within around 100 ms!!! |
| IRDATA_FLAGS_IS_AUTO_REPEAT | The current repeat frame is a repeat, that is always sent after a regular frame and cannot be avoided. Only specified for protocols DENON, and LEGO. |
| IRDATA_FLAGS_PARITY_FAILED | The current (autorepeat) frame violated parity check. |
| IRDATA_FLAGS_TOGGLE_BIT | Is set if RC5 or RC6 toggle bit is set. |
| IRDATA_FLAGS_EXTRA_INFO | There is extra info not contained in address and data (e.g. Kaseikyo unknown vendor ID, or in decodedRawDataArray). |
| IRDATA_FLAGS_WAS_OVERFLOW | Too many marks and spaces for the specified RAW_BUFFER_LENGTH. To avoid endless flagging of overflow, irparams.rawlen is set to 0 in this case. |
| IRDATA_FLAGS_IS_MSB_FIRST | This value is mainly determined by the (known) protocol. |
To access the RAW data, use:
The definitions for the IrReceiver.decodedIRData.flags are described here.
Print all fields:
Print the raw timing data received:
``c++ IrReceiver.printIRResultRawFormatted(&Serial, true);
Callback functionality
Sometimes it can be difficult to call decode() periodically in the main loop to avoid missing any IR frames. In this case you can use the callback functionality as demonstrated in the CallbackDemo example. This enables you to perform resume() and short actions independently of the state of your main loop.
Ambiguous protocols
NEC, Extended NEC, ONKYO, OpenLASIR
The NEC protocol is defined as 8 bit address and 8 bit command. But the physical address and data fields are each 16 bit wide. The additional 8 bits are used to send the inverted address or command for parity checking.
The extended NEC protocol uses the additional 8 parity bit of address for a 16 bit address, thus disabling the parity check for address.
The ONKYO protocol in turn uses the additional 8 parity bit of address and command for a 16 bit address and command.
The decoder reduces the 16 bit values to 8 bit ones if the parity is correct. If the parity is not correct, it assumes no parity error, but takes the values as 16 bit values without parity assuming extended NEC or extended NEC protocol protocol.
But now we have a problem when we want to receive e.g. the 16 bit address 0x00FF or 0x32CD! The decoder interprets this as a NEC 8 bit address 0x00 / 0x32 with correct parity of 0xFF / 0xCD and reduces it to 0x00 / 0x32.
One way to handle this, is to force the library to always use the ONKYO protocol interpretation by using #define DECODE_ONKYO. Another way is to check if IrReceiver.decodedIRData.protocol is NEC and not ONKYO and to revert the parity reducing manually.
The OpenLASIR protocol is binary identical to ONKYO but has a different semantics. It is recommended to disable #define DECODE_ONKYO and enable #define DECODE_OPENLASIR when working with OpenLASIR.
NEC, NEC2
On a long press, the NEC protocol does not repeat its frame, it sends a special short repeat frame. This enables an easy distinction between long presses and repeated presses and saves a bit of battery energy. This behavior is quite unique for NEC and its derived protocols like LG and Samsung.
But of course there are also remote control systems, that uses the NEC protocol but only repeat the first frame when a long press is made instead of sending the special short repeat frame. We named this the NEC2 protocol and it is sent with sendNEC2().
But be careful, the NEC2 protocol can only be detected by the NEC library decoder after the first frame and if you do a long press!
Samsung, SamsungLG
On a long press, the SamsungLG protocol does not repeat its frame, it sends a special short repeat frame.
RAM usage of different protocols
The RAW_BUFFER_LENGTH determines the length of the byte buffer where the received IR timing data is stored before decoding.
100 is sufficient for standard protocols up to 48 bits, with 1 bit consisting of one mark and space. We always require additional 4 bytes, 1 byte for initial gap, 2 bytes for header and 1 byte for stop bit.
- 48 bit protocols are PANASONIC, KASEIKYO, SAMSUNG48, RC6.
- 32 bit protocols like NEC, SAMSUNG, WHYNTER, SONY(20), LG(28), OpenLASIR require a buffer length of 68.
- 16 bit protocols like BOSEWAVE, DENON, FAST, JVC, LEGO_PF, RC5, SONY(12 or 15) require a buffer length of 36.
- MAGIQUEST requires a buffer length of 112.
- Air conditioners often send a longer protocol data stream up to 750 bits.
If the record gap determined by RECORD_GAP_MICROS is changed from the default 8 ms to more than 20 ms, the buffer is no longer a byte but a uint16_t buffer, requiring twice as much RAM.
Handling unknown Protocols
Disclaimer
This library was designed to fit inside MCUs with relatively low levels of resources and was intended to work as a library together with other applications which also require some resources of the MCU to operate.
Use the ReceiveDemo example to print out all informations about your IR protocol.
The ReceiveDump example gives you more information but has bad repeat detection due to the time required for printing the information.
Other libraries, which may cover these protocols
IRMP
If your protocol seems not to be supported by this library, you may try the IRMP library, which especially supports manchester protocols much better.
IRremoteESP8266
For air conditioners , you may try the IRremoteESP8266 library, which supports an impressive set of protocols and a lot of air conditioners and works also on ESP32.
rawirdecode and HeatpumpIR
Raw-IR-decoder-for-Arduino is not a library, but an arduino example sketch, which provides many methods of decoding especially air conditioner protocols. Sending of these protocols can be done by the Arduino library HeatpumpIR.
Protocol=PULSE_DISTANCE
If you get something like this:
then you have a code consisting of 56 bits, which is probably from an air conditioner remote.
You can send it with sendPulseDistanceWidth().
You can send it with calling sendPulseDistanceWidthData() twice, once for the first 32 bit and next for the remaining 24 bits.
The PULSE_DISTANCE / PULSE_WIDTH decoder just decodes a timing stream to a bitstream stored as hex values. These decoders can not put any semantics like address, command or checksum on this bitstream. But the bitstream is way more readable, than a timing stream. This bitstream is read LSB first by default. If LSB does not suit for further research, you can change it here.
If RAM is not more than 2k, the decoder only accepts mark or space durations up to 2500 microseconds to save RAM space, otherwise it accepts durations up to 10 ms.
Protocol=UNKNOWN
If you see something like Protocol=UNKNOWN Hash=0x13BD886C 35 bits received as output of e.g. the ReceiveDemo example, you either have a problem with decoding a protocol, or an unsupported protocol.
- If you have an odd number of bits received, your receiver circuit probably has problems. Maybe because the IR signal is too weak.
- If you see timings like
+ 600,- 600 + 550,- 150 + 200,- 100 + 750,- 550then one 450 µs space was split into two 150 and 100 µs spaces with a spike / error signal of 200 µs between. Maybe because of a defective receiver or a weak signal in conjunction with another light emitting source nearby. - If you see timings like
+ 500,- 550 + 450,- 550 + 450,- 500 + 500,-1550, then marks are generally shorter than spaces and thereforeMARK_EXCESS_MICROS(specified in your ino file) should be negative to compensate for this at decoding. - If you see
Protocol=UNKNOWN Hash=0x0 1 bits receivedit may be that the space after the initial mark is longer thanRECORD_GAP_MICROS. This was observed for some LG air conditioner protocols. Try again with a line e.g.#define RECORD_GAP_MICROS 12000before the line#include <IRremote.hpp>in your .ino file. - To see more info supporting you to find the reason for your UNKNOWN protocol, you must enable the line
//#define DEBUGin IRremoteInt.h.
How to deal with protocols not supported by IRremote
If you do not know which protocol your IR transmitter uses, you have several choices.
- Just use the hash value to decide which command was received. See the SimpleReceiverForHashCodes example.
- Use the IRreceiveDemo example or IRreceiveDump example to dump out the IR timing. You can then reproduce/send this timing with the SendRawDemo example.
- The IRMP AllProtocol example prints the protocol and data for one of the 40 supported protocols. The same library can be used to send this codes.
- If you have a bigger Arduino board at hand (> 100 kByte program memory) you can try the IRremoteDecode example of the Arduino library DecodeIR.
- Use IrScrutinizer. It can automatically generate a send sketch for your protocol by exporting as "Arduino Raw". It supports IRremote, the old IRLib and Infrared4Arduino.
Sending IR codes
If you have a device at hand which can generate the IR codes you want to work with (aka IR remote), it is recommended to receive the codes with the ReceiveDemo example, which will tell you on the serial output how to send them.
You will discover that the address is a constant and the commands sometimes are sensibly grouped.
If you are uncertain about the numbers of repeats to use for sending, 3 is a good starting point. If this works, you can check lower values afterwards.
If you have enabled DECODE_DISTANCE_WIDTH, the code printed by printIRSendUsage() differs between 8 and 32 bit platforms, so it is best to run the receiving program on the same platform as the sending program.
All sending functions support the sending of repeats if sensible. Repeat frames are sent at a fixed period determined by the protocol. e.g. 110 ms from start to start for NEC.
Keep in mind, that there is no delay after the last sent mark. If you handle the sending of repeat frames by your own, you must insert sensible delays before the repeat frames to enable correct decoding.
Bear in mind, that some devices only accept commands if they are repeated one or two times.
Sending old MSB codes without conversion can be done by using sendNECMSB(), sendSonyMSB(), sendSamsungMSB(), sendJVCMSB() or by converting them manually to LSB.
Sending UNKNOWN protocol
If the protocol is unknown by IRremote, which often is the case for airconditioner codes, you can store the timing sequence in an array and send it with IrSender.sendRaw() or IrSender.sendRaw_P() like done in SendDemo. Do not forget to send repeats.
Sending IRDB IR codes
The codes found in the Flipper-IRDB database are quite straightforward to convert, because the also use the address / command scheme.
Protocol matching is NECext -> Onkyo, Samsung32 -> Samsung, SIRC20 -> Sony with 20 bits etc.
The codes found in the irdb database specify a device, a subdevice and a function. Most of the times, device and subdevice can be taken as upper and lower byte of the address parameter and function is the command parameter for the new structured functions with address, command and repeat-count parameters like e.g. IrSender.sendNEC((device << 8) | subdevice, 0x19, 2).
An exact mapping can be found in the IRP definition files for IR protocols. "D" and "S" denotes device and subdevice and "F" denotes the function.
Send pin
Any pin can be chosen as send pin as long as IR_SEND_PIN is not defined. This is because the PWM signal is generated by default with software bit banging, since SEND_PWM_BY_TIMER is not active.
On ESP32 ledc channel 0 is used for generating the IR PWM.
If IR_SEND_PIN is specified (as C macro), it reduces program size and improves send timing for AVR. If you want to use a variable to specify send pin e.g. with setSendPin(uint8_t aSendPinNumber), you must disable this IR_SEND_PIN macro e.g. with #undef IR_SEND_PIN. Then you can change send pin at any time before sending an IR frame. See also Compile options / macros for this library.
Polarity of send pin
By default the polarity is HIGH for active and LOW for inactive or pause. This corresponds to the connection schema: Pin -> Resistor-> IR-LED -> Ground.
If you want to use the connection schema: VCC -> IR-LED -> Resistor -> Pin, you must specify USE_ACTIVE_LOW_OUTPUT_FOR_SEND_PIN.
List of public IR code databases
http://www.harctoolbox.org/IR-resources.html
Flipper Zero
| Flipper decoding | IRremote decoding |
|---|---|
| Samsung32 | Samsung |
| NEC | NEC |
| NECext | ONKYO |
| <start bit><VendorID:16><VendorID parity:4><Genre1:4><Genre2:4><Command:10><ID:2><Parity:8><stop bit> and ID is MSB of address. address: 8A 02 20 00 command: 56 03 00 00 -> IRremote: Address 0x6A8, sendPanasonic (for 02 20) and Command 0x35 | <start bit><VendorID:16><VendorID parity:4><Address:12><Command:8><Parity of VendorID parity, Address and Command:8><stop bit> |
IRCommandDispatcher class
If you want to handle many IR commands in a structured way, you can use a big switch statement, or use the class IRCommandDispatcher.
The IRCommandDispatcher class receives IR commands and maps them to different functions by means of a mapping array IRMapping[].
By default, every mapped command is blocking. However it can be declared as non-blocking and / or repeatable.
Non-blocking commands are executed immediately, blocking commands are executed if no other command is just running. If another blocking command is currently running, a request to stop is set and the command is stored for the main loop to be executed by checkAndRunSuspendedBlockingCommands(). The request to stop must be checked by any blocking function using the macros DELAY_AND_RETURN_IF_STOP(), RETURN_IF_STOP, BREAK_IF_STOP and IS_STOP_REQUESTED.
Only commands that are marked as repeatable will be exectuted when a IR repeat frame is received. Therefore this only makes sense for non-blocking comands :-).
Code snippets are from IRDispatcherDemo.
Examples of mapping arrays can be found in the IRDispatcherDemo, for QuadrupedControl, for RobotArmControl or for 4 WD RobotCar control
Tiny NEC receiver and sender
For applications only requiring NEC, NEC variants or FAST -see below- protocol, there is a special receiver / sender included, which has very small code size of 500 bytes and does NOT require any timer.
Principle of operation
Unlike IRremote, which samples the input every 50 µs, the TinyReceiver receiver uses a pin change interrupt for on-the-fly decoding. This restricts the range of protocols that can be recognised.
On each level change, the level and the time since the last change are used to incrementally decode the protocol.
With this operating principle, we cannot wait for a timeout and then decode the protocol as IRremote does.
Instead, we need to know which is the last bit (level change) of a protocol in order to perform the final decoding and call of the optional user-provided callback function handleReceivedTinyIRData().
This means that we need to know the number of bits in a protocol and therefore the protocol family in order to decode successfully.
For each complete IR frame/command received, the decoded data is copied to the TinyIRReceiverData structure and the user-provided handleReceivedTinyIRData() function is called in an interrupt context. However, interrupts are explicitly enabled here to allow the use of delay() and millis() etc.
Check out the TinyReceiver and IRDispatcherDemo examples.
Take care to include TinyIRReceiver.hpp or TinyIRSender.hpp instead of IRremote.hpp.
TinyIRReceiver usage
TinyIRSender usage
Another tiny receiver and sender supporting more protocols can be found here.
The FAST protocol
The FAST protocol is a proprietary modified JVC protocol without address, with parity and with a shorter header. It is meant to have a quick response to the event which sent the protocol frame on another board. FAST takes 21 ms for sending and is sent at a 50 ms period. It has full 8 bit parity for error detection.
FAST protocol characteristics:
- Bit timing is like JVC
- The header is shorter, 3156 µs vs. 12500 µs
- No address and 16 bit data, interpreted as 8 bit command and 8 bit inverted command, leading to a fixed protocol length of (6 + (16 * 3) + 1) * 526 = 55 * 526 = 28930 microseconds or 29 ms.
- Repeats are sent as complete frames but in a 50 ms period / with a 21 ms distance.
Sending FAST protocol with IRremote
Sending FAST protocol with TinyIRSender
The FAST protocol can be received by IRremote and TinyIRReceiver.
Feedback LED
The feedback LED output is enabled by default. This means that the LED is on when we receive or send a mark. The feedback LED code can be completely removed at compile time using the following macros:
NO_LED_RECEIVE_FEEDBACK_CODEfor receivingNO_LED_SEND_FEEDBACK_CODEfor sendingNO_LED_FEEDBACK_CODEfor receiving and sending
Receiving
For receiving, feedback LED can be activated or deactivated programmatically by enableLEDFeedback(), disableLEDFeedback() or setLEDFeedback(bool aEnableLEDFeedback).
The starting value is set by the second parameter of begin(uint_fast8_t aReceivePin, bool aEnableLEDFeedback, uint_fast8_t aFeedbackLEDPin). You can use the macros ENABLE_LED_FEEDBACK and DISABLE_LED_FEEDBACK for the second parameter.
Sending
LED feedback is always enabled when sending and cannot be deactivated programmatically. It can only be deactivated at compile time.
FAQ and hints
Receiving stops after analogWrite() or tone() or after running a motor
The receiver sample interval of 50 µs is generated by a timer. On many boards this must be a hardware timer. On some boards where a software timer is available, the software timer is used.
Be aware that the hardware timer used for receiving should not be used for analogWrite().
Especially motor control often uses the analogWrite() function and will therefore stop the receiving if used on the pins indicated here.
On the Uno and other AVR boards the receiver timer ist the same as the tone timer. Thus receiving will stop after a tone() command. See ReceiveDemo example how to deal with it, i.e. how to use IrReceiver.restartTimer().
Receiving sets overflow flag
The flag IRDATA_FLAGS_WAS_OVERFLOW is set, if RAW_BUFFER_LENGTH is too small for all the marks and spaces of the protocol. This can happen on long protocol frames like the ones from air conditioner. It also can happen, if RECORD_GAP_MICROS is smaller than the real gap between a frame and the repetition frame, thus interpreting both as one consecutive frame. Best is to dump the timing then, to see which reason holds.
Problems with Neopixels, FastLed etc.
IRremote will not work right when you use Neopixels (aka WS2811/WS2812/WS2812B) or other libraries blocking interrupts for a longer time (> 50 µs).
Whether you use the Adafruit Neopixel library, or FastLED, interrupts get disabled on many lower end CPUs like the basic Arduinos for longer than 50 µs.
In turn, this stops the IR interrupt handler from sampling the IR signal.
Each WS2812 LED requires 30 µs at 800 kHz, an 8 pixel strip requires 240 µs and therefore skips 4 samples of the IR signal, which is sampled each 50 µs.
For example, the standard timing for the NEC protocol is 560 µs or 11 samples. However, with a loss of four samples, however, we exceed the accepted 25 % decoding deviation threshold.
One workaround is to wait for the IR receiver to be idle before you send the Neopixel data with if (IrReceiver.isIdle()) { strip.show();}.
This prevents a running IR transmission from beeing broken, and depending on the update rate of the Neopixel, it may work quite well.
There are some other solutions to this on more powerful CPU's, see this page from Marc MERLIN
Does not work/compile with another library
Another library is only working/compiling if you deactivate the line IrReceiver.begin(IR_RECEIVE_PIN, ENABLE_LED_FEEDBACK);.
This is often due to timer resource conflicts with the other library. Please see below.
Multiple IR receivers
This library now supports multiple IR receiver instances (IRrecv) per CPU see the MultipleReceivers example.
There is also another way to use multiple receivers. You can connect the output pins of each IR receiver to one input pin. Then you can use the standard receiver object (IrReceiver). The IR receiver modules internally use an NPN transistor as output device with just a 30k resistor to VCC. This is basically an "open collector" and allows multiple output pins to be connected to one Arduino input pin.
However, keep in mind that any weak / disturbed signal from one of the receivers will also interfere with a good signal from another receiver.
Multiple IR sender instances
This library only supports one IR sender object (IRsend) per CPU.
However since sending is a serial task, you can use setSendPin() to switch the pin to send, thus emulating multiple sender.
Increase strength of sent output signal
The best way to increase the IR power for free is to use 2 or 3 IR diodes in series. One diode requires 1.2 volt at 20 mA or 1.5 volt at 100 mA so you can supply up to 3 diodes with a 5 volt output.
To power 2 diodes with 1.2 V and 20 mA and a 5 V supply, set the resistor to: (5 V - 2.4 V) -> 2.6 V / 20 mA = 130 .
For 3 diodes it requires 1.4 V / 20 mA = 70 .
The actual current might be lower since of loss at the AVR pin. E.g. 0.3 V at 20 mA.
If you do not require more current than 20 mA, there is no need to use an external transistor (at least for AVR chips).
On my Arduino Nanos, I always use a 100 series resistor and one IR LED :grinning:.
Simulate an IR receiver module for sending
To simulate an IR receiver (such as the TSOP1738) which provides an active-low output, you only need to enable the USE_NO_SEND_PWM macro. In the case you must simulate exotic IR receivers, which provides an active-high output, you also need to enable the USE_ACTIVE_HIGH_OUTPUT_FOR_NO_SEND_PWM macro.
Minimal CPU clock frequency
For receiving, the minimal CPU clock frequency is 4 MHz, since the 50 µs timer ISR (Interrupt Service Routine) takes around 12 µs on a 16 MHz ATmega.
The TinyReceiver, which requires no polling, runs with 1 MHz.
For sending, the default software generated PWM has problems on AVR running with 8 MHz. The PWM frequency is around 30 instead of 38 kHz and RC6 is not reliable. You can switch to timer PWM generation by #define SEND_PWM_BY_TIMER.
Bang & Olufsen protocol
The Bang & Olufsen protocol decoder is not enabled by default, i.e if no protocol is enabled explicitly by #define DECODE_<XYZ>. It must always be enabled explicitly by #define DECODE_BEO. This is because it has an IR transmit frequency of 455 kHz and therefore requires a different receiver hardware (TSOP7000).
And because generating a 455 kHz PWM signal is currently only implemented for SEND_PWM_BY_TIMER, sending only works if SEND_PWM_BY_TIMER or USE_NO_SEND_PWM is defined.
For more info, see ir_BangOlufsen.hpp.
Examples for this library
These examples can be found in the Arduino IDE under File > Examples > Examples from Custom Libraries / IRremote.
In order to fit the examples to the 8K flash of ATtiny85 and ATtiny88, the Arduino library ATtinySerialOut is required for this CPU's.
See also DroneBot Workshop SimpleReceiver and SimpleSender.
SimpleReceiver + SimpleSender
The SimpleReceiver and SimpleSender examples are a good starting point. A simple example can be tested online with WOKWI.
SimpleReceiverForHashCodes
The SimpleReceiverForHashCodes uses only the hash decoder. It converts all IR frames longer than 6 to a 32 bit hash code, thus enabling receiving of unknown protocols.
See: http://www.righto.com/2010/01/using-arbitrary-remotes-with-arduino.html
TinyReceiver + TinySender
If code size or timer usage matters, look at these examples.
The TinyReceiver example uses the TinyIRReceiver library which can only receive NEC, Extended NEC, ONKYO and FAST protocols, but does not require any timer. They use pin change interrupt for on the fly decoding, which is the reason for the restricted protocol choice.
TinyReceiver can be tested online with WOKWI.
The TinySender example uses the TinyIRSender library which can only send NEC, ONKYO and FAST protocols.
It sends NEC protocol codes in standard format with 8 bit address and 8 bit command as in SimpleSender example. It has options to send using Extended NEC, ONKYO and FAST protocols. Saves 780 bytes program memory and 26 bytes RAM compared to SimpleSender, which does the same, but uses the IRRemote library (and is therefore much more flexible).
SmallReceiver
If the protocol is not NEC and code size matters, look at this example.
ReceiveDemo + AllProtocolsOnLCD
ReceiveDemo receives all protocols and generates a beep with the Arduino tone() function on each packet received.
Long press of one IR button (receiving of multiple repeats for one command) is detected.
AllProtocolsOnLCD additionally displays the short result on a 1602 LCD. The LCD can be connected parallel or serial (I2C).
By connecting debug pin to ground, you can force printing of the raw values for each frame. The pin number of the debug pin is printed during setup, because it depends on board and LCD connection type.
This example also serves as an example how to use IRremote and tone() together.
ReceiveDump
Receives all protocols and dumps the received signal in different flavors including Pronto format.
Since the printing takes much time, repeat signals may be skipped or interpreted as UNKNOWN.
SendDemo
Sends all available protocols at least once.
MultipleSendPins
Demonstrates sending IR codes toggling between 2 different send pins.
SendAndReceive
Demonstrates receiving while sending.
ReceiveAndSend
Record and play back last received IR signal at button press. IR frames of known protocols are sent by the appropriate protocol encoder. UNKNOWN protocol frames are stored as raw data and sent with sendRaw().
ReceiveAndSendDistanceWidth
Try to decode each IR frame with the universal DistanceWidth decoder, store the data and send it on button press with sendPulseDistanceWidthFromArray().
If RAM is not more than 2k, the decoder only accepts mark or space durations up to 2500 microseconds to save RAM space, otherwise it accepts durations up to 10 ms.
Storing data for distance width protocol requires 17 bytes. The ReceiveAndSend example requires 16 bytes for known protocol data and 37 bytes for raw data of e.g.NEC protocol.
ReceiveOneAndSendMultiple
Serves as a IR remote macro expander. Receives Samsung32 protocol and on receiving a specified input frame, it sends multiple Samsung32 frames with appropriate delays in between. This serves as a Netflix-key emulation for my old Samsung H5273 TV.
IRDispatcherDemo
Calling different functions of your program for different IR codes.
ControlRelay
Control a relay (connected to an output pin) with your remote.
IRremoteExtensionTest
Example for a user defined class, which itself uses the IRrecv class from IRremote.
SendLGAirConditionerDemo
Example for sending LG air conditioner IR codes controlled by Serial input.
By just using the function bool Aircondition_LG::sendCommandAndParameter(char aCommand, int aParameter) you can control the air conditioner by any other command source.
The file acLG.h contains the command documentation of the LG air conditioner IR protocol. Based on reverse engineering of the LG AKB73315611 remote. 
IReceiverTimingAnalysis can be tested online with WOKWI Click on the receiver while simulation is running to specify individual IR codes.
ReceiveAndSendHob2Hood
Example for receiving and sending AEG / Elektrolux Hob2Hood protocol.
ReceiverTimingAnalysis
This example analyzes the signal delivered by your IR receiver module. Values can be used to determine the stability of the received signal as well as a hint for determining the protocol.
It also computes the MARK_EXCESS_MICROS value, which is the extension of the mark (pulse) duration introduced by the IR receiver module.
It can be tested online with WOKWI. Click on the receiver while simulation is running to specify individual NEC IR codes.
UnitTest
ReceiveDemo + SendDemo in one program. Demonstrates receiving while sending. Here you see the delay of the receiver output (blue) from the IR diode input (yellow). 
WOKWI online examples
- Simple receiver
- Simple toggle by IR key 5
- TinyReceiver
- ReceiverTimingAnalysis
- Receiver with LCD output and switch statement
IR control of a robot car
This example of the Arduino PWMMotorControl library controls the basic functions of a robot car using the IRremote library.
It controls 2 PWM motor channels, 2 motors at each channel.
Here you can find the instructable for car assembly and code.
IR_RobotCar with TL1838 IR receiver plugged into expansion board.

Issues and discussions
- Do not open an issue without first testing some of the examples!
- If you have a problem, please post the MCVE (Minimal Complete Verifiable Example) showing this problem. My experience is, that most of the times you will find the problem while creating this MCVE :smile:.
- Use code blocks; it helps us to help you when we can read your code!
Compile options / macros for IRremote
To customize the library to different requirements, there are some compile options / macros available.
These macros must be defined in your program before the line #include <IRremote.hpp> to take effect.
Modify them by enabling / disabling them, or change the values if applicable.
| Name | Default value | Description |
|---|---|---|
RAW_BUFFER_LENGTH | 200 | Buffer size of raw input uint16_t buffer. Must be even! If it is too small, overflow flag will be set. 100 is sufficient for regular protocols of up to 48 bits, but for most air conditioner protocols a value of up to 750 is required. Use the ReceiveDump example to find smallest value for your requirements. A value of 200 requires 200 bytes RAM. |
USE_16_BIT_TIMING_BUFFER | disabled | Use a 16-bit buffer if raw timing capture is required and exact values above 12750 us must be preserved. This doubles the RAM size of the buffer. |
EXCLUDE_UNIVERSAL_PROTOCOLS | disabled | Excludes the universal decoder for pulse distance width protocols and decodeHash (special decoder for all protocols) from decode(). Saves up to 1000 bytes program memory. |
EXCLUDE_EXOTIC_PROTOCOLS | disabled | Excludes BANG_OLUFSEN, BOSEWAVE, WHYNTER, FAST LEGO_PF, and OpenLASIR from decode() and from sending with IrSender.write(). Saves up to 650 bytes program memory. |
DECODE_<Protocol name> | all | Selection of individual protocol(s) to be decoded. You can specify multiple protocols. See here |
USE_THRESHOLD_DECODER | disabled | If enabled, may give slightly better results especially for jittering signals and protocols with short 1 pulses / pauses and forces value of MARK_EXCESS_MICROS to 0 to save program memory. Requires up to additional 120 bytes program memory. |
USE_STRICT_DECODER | disabled | Check for all 4 one and zero protocol timings. Only sensible for development or very exotic requirements. Requires up to 300 additional bytes of program memory. |
IR_REMOTE_DISABLE_RECEIVE_COMPLETE_CALLBACK | disabled | Saves up to 60 bytes of program memory and 2 bytes RAM. |
MARK_EXCESS_MICROS | 20 | MARK_EXCESS_MICROS is subtracted from all marks and added to all spaces before decoding, to compensate for the signal forming of different IR receiver modules. Is set to 20 if DO_NOT_USE_THRESHOLD_DECODER is enabled. |
RECORD_GAP_MICROS | 5000 | Minimum gap between IR transmissions, to detect the end of a protocol. Must be greater than any space of a protocol e.g. the NEC header space of 4500 µs. Must be smaller than any gap between a command and a repeat; e.g. the retransmission gap for Sony is around 24 ms. Keep in mind, that this is the delay between the end of the received command and the start of decoding. |
DISTANCE_WIDTH_DECODER_DURATION_ARRAY_SIZE | 50 if RAM <= 2k, else 200 | A value of 200 allows to decode mark or space durations up to 10 ms. |
IR_INPUT_IS_ACTIVE_HIGH | disabled | Enable it if you use a RF receiver, which has an active HIGH output signal. |
IR_SEND_PIN | disabled | If specified, it reduces program size and improves send timing for AVR. If you want to use a variable to specify send pin e.g. with setSendPin(uint8_t aSendPinNumber), you must not use / disable this macro in your source. |
SEND_PWM_BY_TIMER | disabled | Disables carrier PWM generation in software and use hardware PWM (by timer). Has the advantage of more exact PWM generation, especially the duty cycle (which is not very relevant for most IR receiver circuits), and the disadvantage of using a hardware timer, which in turn is not available for other libraries and to fix the send pin (but not the receive pin) at the dedicated timer output pin(s). Is enabled for ESP32 and RP2040 in all examples, since they support PWM generation for each pin without using a shared resource (timer). |
IR_SEND_DUTY_CYCLE_PERCENT | 30 | Duty cycle of IR send signal. |
USE_ACTIVE_LOW_OUTPUT_FOR_SEND_PIN | disabled | Reverses the polarity of space level for PWM at the send pin, i.e. space is high. Can be used to connect IR LED between VCC and the send pin. It is like open drain but with electrical active high in its logical inactive state. |
USE_OPEN_DRAIN_OUTPUT_FOR_SEND_PIN | disabled | Uses or simulates open drain output mode for PWM at send pin. Attention, active state of open drain is LOW, so connect the send LED between positive supply and send pin! |
USE_NO_SEND_PWM | disabled | Uses no carrier PWM, just simulate an active low receiver signal. Used for transferring signal by cable instead of IR. Overrides SEND_PWM_BY_TIMER definition. |
USE_ACTIVE_HIGH_OUTPUT_FOR_NO_SEND_PWM | disabled | Only evaluated if USE_NO_SEND_PWM is enabled. Simulate an active high receiver signal instead of an active low signal. |
DISABLE_CODE_FOR_RECEIVER | disabled | Disables static receiver code like receive timer ISR handler and static IRReceiver and irparams data. Saves 450 bytes program memory and 269 bytes RAM if receiving functions are not required. |
FEEDBACK_LED_IS_ACTIVE_LOW | disabled | Required on some boards (like my BluePill and my ESP8266 board), where the feedback LED is active low. |
NO_LED_FEEDBACK_CODE | disabled | Disables the LED feedback code for send and receive. Saves around 100 bytes program memory for receiving, around 500 bytes for sending and halving the receiver ISR (Interrupt Service Routine) processing time. |
NO_LED_RECEIVE_FEEDBACK_CODE | disabled | Disables the LED feedback code for receive. Saves around 100 bytes program memory for receiving and halving the receiver ISR (Interrupt Service Routine) processing time. |
NO_LED_SEND_FEEDBACK_CODE | disabled | Disables the LED feedback code for send. Saves around 322 bytes for sending. |
MICROS_PER_TICK | 50 | Resolution of the raw input buffer data. Corresponds to 2 pulses of each 26.3 µs at 38 kHz. |
TOLERANCE_FOR_DECODERS_MARK_OR_SPACE_MATCHING_PERCENT | 25 | Relative tolerance for matchTicks(), matchMark() and matchSpace() functions used for protocol decoding. |
DEBUG | disabled | Enables lots of lovely debug output. |
IR_USE_AVR_TIMER* | Selection of timer to be used for generating IR receiving sample interval. |
Macros for TinyIR
These macros must be defined in your program before the line #include <TinyIRReceiver.hpp> to take effect.
| Name | Default value | Description |
|---|---|---|
IR_RECEIVE_PIN | 2 | The pin number for TinyIRReceiver IR input, which gets compiled in. Not used in IRremote. |
IR_FEEDBACK_LED_PIN | LED_BUILTIN | The pin number for TinyIRReceiver feedback LED, which gets compiled in. |
NO_LED_FEEDBACK_CODE | disabled | Disables the feedback LED code for send and receive. Saves 14 bytes program memory. |
NO_LED_RECEIVE_FEEDBACK_CODE | disabled | Disables the LED feedback code for receive. |
NO_LED_SEND_FEEDBACK_CODE | disabled | Disables the LED feedback code for send. |
DISABLE_PARITY_CHECKS | disabled | Disables the address and command parity checks. Saves 48 bytes program memory. |
| USE_EXTENDED_NEC_PROTOCOL | disabled | Like NEC, but take the 16 bit address as one 16 bit value and not as 8 bit normal and 8 bit inverted value. || USE_ONKYO_PROTOCOL | disabled | Like NEC, but take the 16 bit address and command each as one 16 bit value and not as 8 bit normal and 8 bit inverted value. | | USE_FAST_PROTOCOL | disabled | Use FAST protocol (no address and 16 bit data, interpreted as 8 bit command and 8 bit inverted command) instead of NEC. | | ENABLE_NEC2_REPEATS | disabled | Instead of sending / receiving the NEC special repeat code, send / receive the original frame for repeat. | | USE_CALLBACK_FOR_TINY_RECEIVER | disabled | Call the user provided function void handleReceivedTinyIRData() each time a frame or repeat is received. |
Macros for IRCommandDispatcher
These macros must be defined in your program before the line #include <IRCommandDispatcher.hpp> to take effect.
| Name | Default value | Description |
|---|---|---|
USE_TINY_IR_RECEIVER | disabled | Use TinyReceiver for receiving IR codes. |
IR_COMMAND_HAS_MORE_THAN_8_BIT | disabled | Enables mapping and dispatching of IR commands consisting of more than 8 bits. Saves up to 160 bytes program memory and 5 bytes RAM + 1 byte RAM per mapping entry. |
IR_ADDRESS | empty | If set, compare the address returned by the IR library with this value before executing a command. |
DISPATCHER_BUZZER_FEEDBACK_PIN | If USE_TINY_IR_RECEIVER is enabled, the pin to be used for the optional 50 ms buzzer feedback before executing a command. Other IR libraries than Tiny are not compatible with tone() command. | |
USE_DISPATCHER_COMMAND_STRINGS | disabled | Enables printing of command strings. Requires additional 2 bytes RAM for each command mapping. Requires program memory for strings, but saves snprintf() code (1.5k) if INFO or DEBUG is activated, which has no effect if snprintf() is also used in other parts of your program / libraries. |
Changing include (*.h) files with Arduino IDE
First, use Sketch > Show Sketch Folder (Ctrl+K).
If you have not yet saved the example as your own sketch, then you are instantly in the right library folder.
Otherwise you have to navigate to the parallel libraries folder and select the library you want to access.
In both cases the library source and include files are located in the libraries src directory.
The modification must be renewed for each new library version!
Modifying compile options / macros with PlatformIO
If you are using PlatformIO, you can define the macros in the platformio.ini file with build_flags = -D MACRO_NAME or build_flags = -D MACRO_NAME=macroValue.
Modifying compile options / macros with Sloeber IDE
If you are using Sloeber as your IDE, you can easily define global symbols with Properties > Arduino > CompileOptions.

Supported Boards
Issues and discussions with the content "Is it possible to use this library with the ATTinyXYZ? / board XYZ" without any reasonable explanations will be immediately closed without further notice.
For ESP8266/ESP32, the IRremoteESP8266 library supports an impressive set of protocols and a lot of air conditioners.
ATtiny CPU's are tested with the Arduino library ATtinySerialOut library.
Digispark boards are tested only with ATTinyCore using the New Style pin mapping for the Digispark Pro board.
ATtiny boards are tested only with ATTinyCore or megaTinyCore.
- Arduino Uno / Mega / Leonardo / Duemilanove / Diecimila / LilyPad / Mini / Fio / Nano etc.
- Arduino Uno R4, but not yet tested, because of lack of a R4 board. Sending does not work on the
arduino:renesas_uno:unor4wifi. - Teensy 1.0 / 1.0++ / 2.0 / 2++ / 3.0 / 3.1 / 3.2 / Teensy-LC - but limited support; Credits: PaulStoffregen (Teensy Team)
- Sanguino
- ATmega8, 48, 88, 168, 328
- ATmega8535, 16, 32, 164, 324, 644, 1284,
- ATmega64, 128
- ATmega4809 (Nano every)
- ATtiny3217 (Tiny Core 32 Dev Board)
- ATtiny84, 85, 167 (Digispark + Digispark Pro)
- SAMD (Zero, MKR*, but not DUE, the latter is SAM architecture)
- ESP8266
- ESP32, ESP32-C3 since board package 2.0.2 from Espressif. Other CPUs are not tested! SP32-S3 is not supported (yet).
- Sparkfun Pro Micro
- Nano Every, Uno WiFi Rev2, nRF5 BBC MicroBit, Nano33_BLE
- BluePill with STM32
- RP2040 based boards (Raspberry Pi Pico, Nano RP2040 Connect etc.)
- Indian VEGA RISC-V boards - not tested
We are open to suggestions for adding support to new boards, however we highly recommend you contact your supplier first and ask them to provide support from their side.
If you can provide examples of using a periodic timer for interrupts for the new board, and the board name for selection in the Arduino IDE, then you have way better chances to get your board supported by IRremote.
Timer and pin usage
The receiver sample interval of 50 µs is generated by a timer. On many boards this must be a hardware timer. On some boards where a software timer is available, the software timer is used.
On ESP8266 timer1 is used for receive interrupts, which makes it incompatible to the Servo and other libraries.
On ESP32 hw_timer_t is used for receive interrupts.
Every pin can be used for receiving.
If software PWM is selected, which is default, every pin can also be used for sending. Sending with software PWM does not require a timer!
The TinyReceiver example uses the TinyReceiver library, which can only receive NEC codes, but does not require any timer and runs even on a 1 MHz ATtiny85.
The code for the timer and the timer selection is located in private/IRTimer.hpp. The selected timer can be adjusted here.
Be aware that the hardware timer used for receiving should not be used for analogWrite()!.
| Board/CPU | Receive & send PWM Timer Default timer is bold | Hardware-Send-PWM Pin | analogWrite() pins occupied by timer |
|---|---|---|---|
| ATtiny84 | 1 | 6 | |
| ATtiny85 > 4 MHz | 0, 1 | 0, 4 | 0, 1 & 4 |
| ATtiny88 > 4 MHz | 1 | PB1 / 8 | PB1 / 8 & PB2 / 9 |
| ATtiny167 > 4 MHz | 1 | 9, 8 - 15 | 8 - 15 |
| ATtiny1604 | TCB0 | PA05 | | ATtiny1614, ATtiny816 | TCA0 | PA3 | | ATtiny1624 | TCA0 | PA3 | | ATtiny3217 | TCA0, TCD | % | | ATmega8 | 1 | 9 | | ATmega1284 | 1, 2, 3 | 13, 14, 6 | | ATmega164, ATmega324, ATmega644 | 1, 2 | 13, 14 | | ATmega8535 ATmega16, ATmega32 | 1 | 13 | | ATmega64, ATmega128, ATmega1281, ATmega2561 | 1 | 13 | | ATmega8515, ATmega162 | 1 | 13 | | ATmega168, ATmega328 | 1, 2 | 9, 3 | 9 & 10, 3 & 11 | | ATmega1280, ATmega2560 | 1, 2, 3, 4, 5 | 5, 6, 9, 11, 46 | 5, 6, 9, 11, 46 | | ATmega4809 | TCB0 | A4 | | | Leonardo (Atmega32u4) | 1, 3, 4_HS | 5, 9, 13 | 5, 9, 13 | | Zero (SAMD) | TC3 | *, 9 | | | ESP8266 | timer1 | % | | | ESP32 | hw_timer_t
**Ledc channel 0** | All pins | | | Sparkfun Pro Micro | 1, 3 | 5, 9 | | | Teensy 1.0 | 1 | 17 | 15, 18 | | Teensy 2.0 | 1, 3, 4_HS | 9, 10, 14 | 12 | | Teensy++ 1.0 / 2.0 | 1, 2, 3 | 1, 16, 25 | 0 | | Teensy-LC | TPM1 | 16 | 17 | | Teensy 3.0 - 3.6 | CMT | 5 | | | Teensy 4.0 - 4.1 | FlexPWM1.3 | 8 | 7, 25 | | BluePill / STM32F103C8T6 | 3 | % | PA6 & PA7 & PB0 & PB1 | | BluePill / STM32F103C8T6 | TIM4 | % | PB6 & PB7 & PB8 & PB9 | | RP2040 / Pi Pico | default alarm pool | All pins | No pin | | RP2040 / Mbed based | Mbed Ticker | All pins | No pin |
No timer required for sending
The send PWM signal is by default generated by software. Therefore every pin can be used for sending. The PWM pulse length is guaranteed to be constant by using delayMicroseconds(). Take care not to generate interrupts during sending with software generated PWM, otherwise you will get jitter in the generated PWM. E.g. wait for a former Serial.print() statement to be finished by Serial.flush(). Since the Arduino micros() function has a resolution of 4 µs at 16 MHz, we always see a small jitter in the signal, which seems to be OK for the receivers.
Software generated PWM showing small jitter because of the limited resolution of 4 µs of the Arduino core micros() function for an ATmega328 | Detail (ATmega328 generated) showing 30% duty cycle |
|---|---|
 |  |
Incompatibilities to other libraries and Arduino commands like tone() and analogWrite()
If you use a library which requires the same timer as IRremote, you have a problem, since the timer resource cannot be shared simultaneously by both libraries.
Use NEC protocol and TinyReceiver
TinyReceiver does not require a timer, it relies on interrupts, thus avoiding any timer resource problems.
Change timer
The best approach is to change the timer used for IRremote, which can be accomplished by specifying the timer before #include <IRremote.hpp>.
The timer specifications available for your board can be found in private/IRTimer.hpp.
Here you see the Arduino Mega board and the available specifications are IR_USE_AVR_TIMER[1,2,3,4,5].
You just have to include a line e.g. #define IR_USE_AVR_TIMER3 before #include <IRremote.hpp> to enable timer 3.
But be aware that the new timer in turn might be again incompatible with other libraries or Arduino functions.
For non AVR boards/platforms you must look for the appropriate section guarded by e.g. #elif defined(ESP32).
Stop and start timer
Another approach can be to share the timer sequentially if their functionality is used only for a short period of time like for the Arduino tone() command. An example can be seen here, where the IR timer is restarted after the tone has stopped.
This works on AVR boards like Uno because each call totone() completely initializes the timer 2 used by the tone() command.
Hardware-PWM signal generation for sending
If you define SEND_PWM_BY_TIMER, the send PWM signal is forced to be generated by a hardware timer on most platforms.
By default, the same timer as for the receiver is used.
Since each hardware timer has its dedicated output pin(s), you must change timer or timer sub-specifications to change PWM output pin. See private/IRTimer.hpp
Exceptions are currently ESP32, ARDUINO_ARCH_RP2040, PARTICLE and ARDUINO_ARCH_MBED, where PWM generation does not require a timer.
Why do we use 30% duty cycle for sending
We do it according to the statement in the Vishay datasheet:
- Carrier duty cycle 50 %, peak current of emitter IF = 200 mA, the resulting transmission distance is 25 m.
- Carrier duty cycle 10 %, peak current of emitter IF = 800 mA, the resulting transmission distance is 29 m. - Factor 1.16 The reason is, that it is not the pure energy of the fundamental which is responsible for the receiver to detect a signal. Due to automatic gain control and other bias effects, high intensity of the 38 kHz pulse counts more than medium intensity (e.g. 50% duty cycle) at the same total energy.
How we decode signals
The IR signal is sampled at a 50 µs interval. For a constant 525 µs pulse or pause we therefore get 10 or 11 samples, each with 50% probability.
And believe me, if you send a 525 µs signal, your receiver will output something between around 400 and 700 µs!
Therefore we decode by default with a +/- 25% margin using the formulas here.
E.g. for the NEC protocol with its 560 µs unit length, we have TICKS_LOW = 8.358 and TICKS_HIGH = 15.0. This means, we accept any value between 8 ticks / 400 µs and 15 ticks / 750 µs (inclusive) as a mark or as a zero space. For a one space we have TICKS_LOW = 25.07 and TICKS_HIGH = 45.0.
And since the receivers generated marks are longer or shorter than the spaces, we have introduced the MARK_EXCESS_MICROS macro to compensate for this receiver and signal strength as well as ambient light dependent :disappointed: specific deviation.
Welcome to the world of real world signal processing.
NEC encoding diagrams
Created with sigrok PulseView with IR_NEC decoder by DjordjeMandic.
8 bit address NEC code 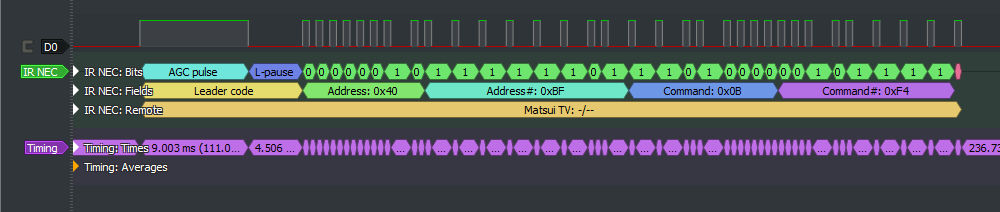 16 bit address NEC code
16 bit address NEC code 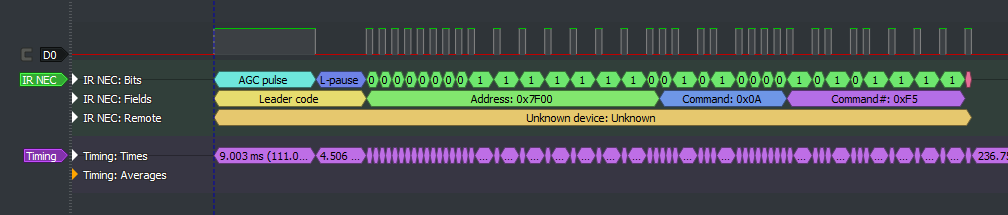
Quick comparison of 5 Arduino IR receiving libraries
This is a short comparison and may not be complete or correct.
I created this comparison matrix for myself in order to choose a small IR library for my project and to have a quick overview, when to choose which library.
It is dated from 24.06.2022 and updated 10/2023. If you have complains about the data or request for extensions, please send a PM or open a discussion.
Here you find an ESP8266/ESP32 version of IRremote with an impressive list of supported protocols.
| Subject | IRMP | IRLremote | IRLib2 **mostly unmaintained** | IRremote | TinyIR | IRsmallDecoder |
|---|---|---|---|---|---|---|
| Number of protocols | 50 | Nec + Panasonic + Hash * | 12 + Hash * | 17 + PulseDistance + Hash * | NEC + FAST | NEC + RC5 + Sony + Samsung |
| Timing method receive | Timer2 or interrupt for pin 2 or 3 | Interrupt | Timer2 or interrupt for pin 2 or 3 | Timer2 | Interrupt | Interrupt |
| Timing method send | PWM and timing with Timer2 interrupts | Timer2 interrupts | Timer2 and blocking wait | PWM with Timer2 and/or blocking wait with delay Microseconds() | blocking wait with delay Microseconds() | % |
| Send pins | All | All | All ? | Timer dependent | All | % |
| Decode method | OnTheFly | OnTheFly | RAM | RAM | OnTheFly | OnTheFly |
| Encode method | OnTheFly | OnTheFly | OnTheFly | OnTheFly or RAM | OnTheFly | % |
| Callback support | x | % | % | x | x | % |
| Repeat handling | Receive + Send (partially) | % | ? | Receive + Send | Receive + Send | Receive |
| LED feedback | x | % | x | x | Receive | % |
| FLASH usage (simple NEC example with 5 prints) | 1820 (4300 for 15 main / 8000 for all 40 protocols) (+200 for callback) (+80 for interrupt at pin 2+3) | 1270 (1400 for pin 2+3) | 4830 | 1770 | 900 | ?1100? |
| RAM usage | 52 (73 / 100 for 15 (main) / 40 protocols) | 62 | 334 | 227 | 19 | 29 |
| Supported platforms | avr, megaavr, attiny, Digispark (Pro), esp8266, ESP32, STM32, SAMD 21, Apollo3 (plus arm and pic for non Arduino IDE) | avr, esp8266 | avr, SAMD 21, SAMD 51 | avr, attiny, esp8266, esp32, SAM, SAMD | All platforms with attach Interrupt() | All platforms with attach Interrupt() |
| Last library update | 5/2023 | 4/2018 | 11/2022 | 9/2023 | 5/2023 | 2/2022 |
| Remarks | Decodes 40 protocols concurrently. 39 Protocols to send. Work in progress. | Only one protocol at a time. | Consists of 5 libraries. Project containing bugs - 63 issues, 10 pull requests.* | Universal decoder and encoder. Supports **Pronto codes and sending of raw timing values. | Requires no timer. | Requires no timer. |
- The Hash protocol gives you a hash as code, which may be sufficient to distinguish your keys on the remote, but may not work with some protocols like Mitsubishi
History
Useful links
- Online NEC to Pronto converting tool
- List of public IR code databases
- LIRC database
- IRMP list of IR protocols
- IRDB database for IR codes
- IRP definition files for IR protocols
- Good introduction to IR remotes by DroneBot Workshop
- IR Remote Control Theory and some protocols (upper right hamburger icon)
- Overviev of many protocols
- Overviev of many protocols on one page (v2.45)
- "Recording long Infrared Remote control signals with Arduino"
- The original blog post of Ken Shirriff A Multi-Protocol Infrared Remote Library for the Arduino
- Vishay datasheet
Contributors
License
Up to the version 2.7.0, the License is GPLv2. From the version 2.8.0, the license is the MIT license.
Copyright
Initially coded 2009 Ken Shirriff http://www.righto.com
Copyright (c) 2016-2017 Rafi Khan https://rafikhan.io
Copyright (c) 2020-2025 Armin Joachimsmeyer
